四轮转向系统;汽车教学设备
四轮转向系统
四轮转向系统中的后轮也可以转向;
后轮转向根据车辆速度(或者转向盘的转角)来控制。
在车速较低(或转向盘转角很大)时,后轮的转向与前轮相反。
当车辆行驶速度较高(或转向盘转角较小)时,后轮的转向与前轮相同。
21.4.1电控四轮转向
在电子控制的四轮转向系统中,前轮转向器和后轮转向执行器之间没有任何机械连接装置,后轮转向执行器由转向电子控制模块来控制。
电子控制系统中的四轮转向系统利用转向盘转动速度、车辆行驶速度和前轮转角的信息来计算并控制后轮转角。
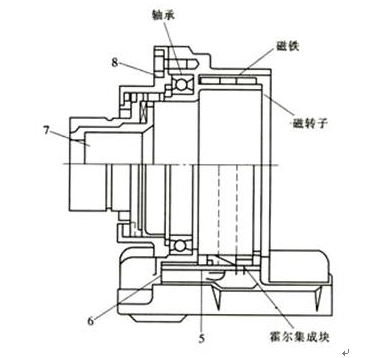
1.后轮转向执行器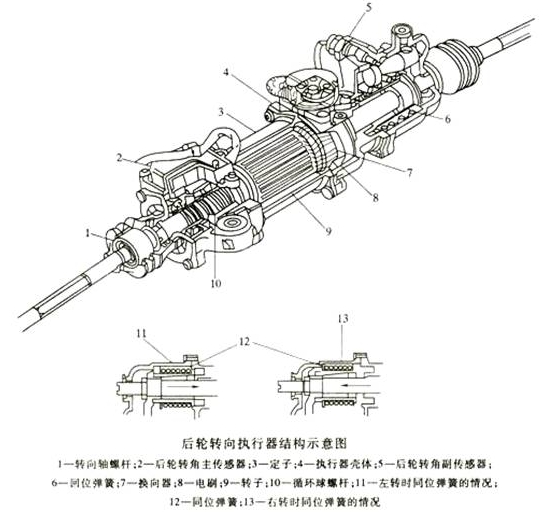
包含一个通过循环球螺杆机构驱动转向齿条的电动机。
2、传感器
(1)后轮转角主传感器
位于后轮转向执行器左侧
包括脉冲环(随循环球螺杆旋转)和霍尔传感元件
当脉冲环旋转时,霍尔传感元件向电子控制模块发出脉冲数字电压信号,显示后轮转角。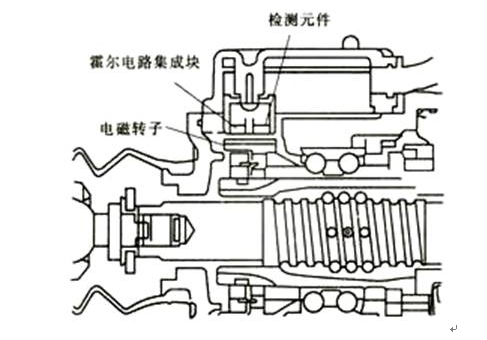
(2)后轮转角副传感器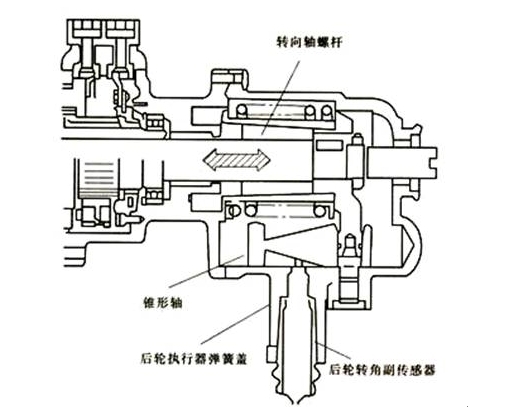
(3)转向盘转向传感器
一般采用霍尔效应原理
能够检测转向盘的转动方向、转动速度和转动角度
转向盘转动时,转向传感器向电子控制模块传送前轮转动的信号
(4)前轮转角传感器
(5)后轮转速传感器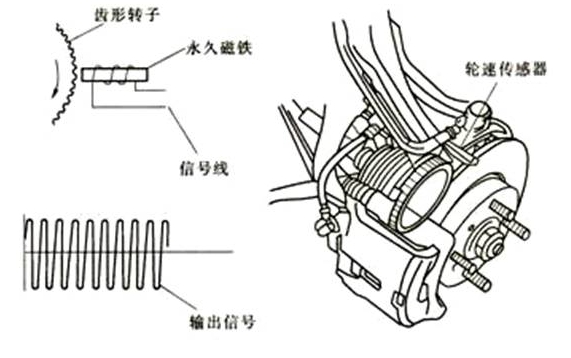
(6)车速传感器
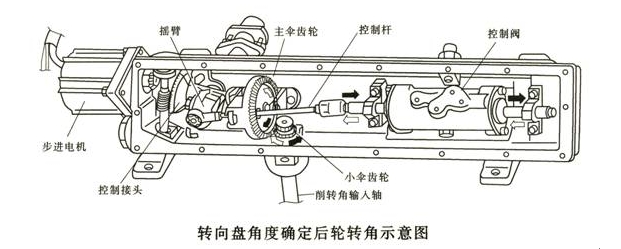
3、四轮转向系统的工作:见下图(图21-23)
四轮转向系统的工作特性见下图(图21-24)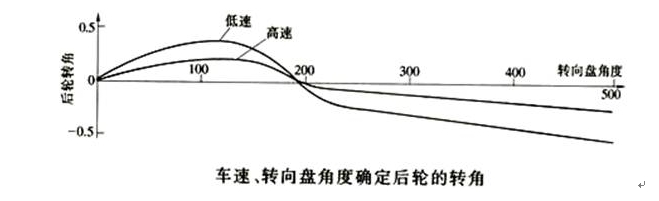
21.4.2电子控制、液压驱动的四轮转向
系统的基本结构见下图(图21-25)