


JD-980F型工业机器人AR实训系
|
设备名称 |
分类 |
基本参数 |
|
系统说明 |
说明 |
工业机器人AR实训系统是一套结合了工业机器人技术,增强显示技术,智能眼镜平台综合性机器人实现开发应用平台。真正解决工业机器人教学难,危险,维护困难,示教方式不直观等难题,采用真实工业机器人示教器,结合虚拟投影的实体3D工业机器人,做到实时交互,真实示教,编译仿真,虚实结合,沉浸式工业机器人实训教学。 该实训系统通过AR智能眼镜成像系统,将工业机器人及工业自动化系统以虚拟影响3D显示,且做得与实际环境完全呼应,让人感觉不到真实与虚拟的区别,学生或教师手持真实的工业机器人示教器可对该虚拟投影机器人系统进行指令编程,实操,系统设置,维护,3D增强现实机器人根据指令及编程做出与真实工业机器人完全一体化的动作及工艺加工,做到虚实结合,真正解决工业机器人昂贵,危险系数高,维护困难等教学难题,真正做到人手一机,实践教学的目的。 工业机器人AR实训系统采用虚拟化与真实化叠加场景化教学,将传统的工业机器人教学与先进的增强现实技术融合并建立丰富的工业机器人教学课程资源库,使得工业机器人实训教学真正实现:人手一机,无事故,低成本,无维护,高效率,沉浸式的场景化教学方案 该工业机器人AR实训系统能够具有焊接,喷涂,组装等多种工业机器人应用工作站平台,且具有原理认知,示教开发,编程应用,维护安装以及综合应用多个层次的实训开发板块,使学生能够从认知,到应用再到创新实践的全面的提高和实践过程。 |
|
智能眼镜:REALSEER_1 |
光学镜片 |
光学具备最优体积和FOV平衡技术,符合人体工学体验设计,专用光学镜片采用单点金刚石超精密加工磨具,加工齿距<0.2mm;使用光学级专用注塑料,填充率>90%,一体成型精度误差<+-0.05mm。 镜片采用超真空多层镀膜技术-硬化膜,增透膜,蓝光截止膜,防指纹膜。反射率和吸收率A+,成像效果达到高清级别。 |
|
处理器 |
电子终端采用64位四核处理器,主频高达2.4G,采用异步时间扭曲渲染,送屏前图像位置校正,实时插帧,SingleBuffer,反畸变,色差校正等技术,基于全系统的性能优化,头动到屏显延迟<18ms,支持6DOF位置跟踪技术,采用800Hz-1000Hz的六轴sensor,单个Camera联动6DOF,SensorFusion算法基于DSP实现; 支持眼动追踪,支持智能语音识别。 |
|
|
软件 |
软件方案能够支持百万级别识别,具备SaaS层应用开发和API接口,提供Cloud和Device端的Service架构,采用自主知识产权的AR SDK技术,具有全系统的优化能力。 |
|
|
图像识别 |
全场景跟踪采用低照度300万像素广角高速摄像头,最低支持 1920 x 1080 30fps 或 1024 x 768 60fps,fov大于120度,Maker不低于 80x80cm ,可实现空间精度定位算法优化和升级 |
|
|
工业机器人控制系统 |
示教系统性能 |
示教器显示尺寸 6.5-inch TFT彩色LCD显示分辨率640 X 480像素显示颜色; 32位真彩触摸屏。 带急停按钮(带灯)、示教启动(带灯)、暂停键(带灯)、模式旋钮(示教/再 现)、手持三段使能开关以及49个操作按键(包括全数字键); 预留电源DC24V电源; HMI接口与控制器连接; ESD Class4/EFT Class4; 外形材质采用ABS工程塑料; 外形尺寸392.8mm×226mm×82mm (误差±1%以内)。 |
|
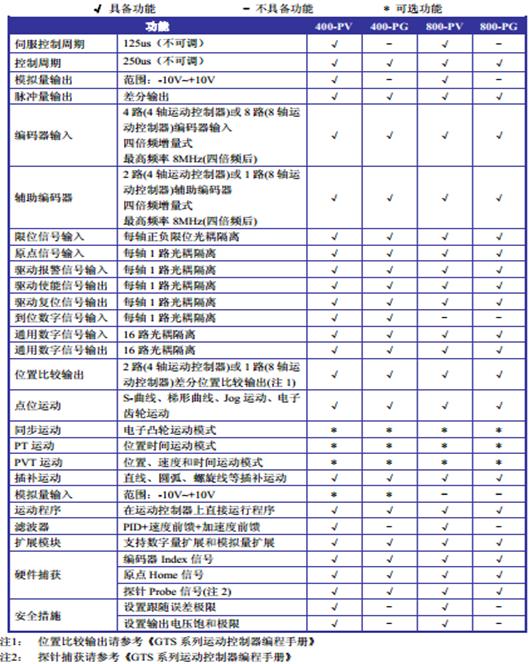
运动控制器 |
GUC-T系列8轴运动控制器功能列表如下 |
|
|
性能 |
|
|
|
通信及图像定位功能 |
无线通信 |
2.4G无线路由 |
|
定位功能 |
l 无线射频显影3D图像技术,2.4G高频射频定位; l 3D渲染识别镀膜,支持位置矫正,反畸变; l 无线3D定位做到高精度高定位,3D效果真实,无漂移,无重影; |
|
|
AR虚拟仿真软件 |
多屏投影互动功能 |
l 具有多屏投影功能,即能够将智能眼镜投影到电脑或投影仪之中实现多人互动 l 支持安卓系统以及WIN7、WIN10系统 l 一次支持10台设备同屏连接,包括WIN7,WIN10系统,安卓系统,智能眼镜系统。 |
|
Windows平台 |
l 支持Windows电脑直接连接示教系统 l 可鼠标拖拽视角,包括远近,旋转等操作 l 可仿真码垛,组装,焊接等多个工艺 |
|
|
安卓平台 |
l 支持安卓4.0以上操作系统 l 高稳定性AR定位,无漂移,无卡顿 l 接近于真实工业机器人的AR体验,且可自行切换视角 |
|
|
智能眼镜平台 |
l 配置蓝牙遥控器,可通过蓝牙遥控操作虚拟投影触摸屏 l 可通过调节比例,尺寸以及虚拟机器人位置角度,做到接近于真实的工业机器人体验 l 可仿真码垛,组装,焊接等多个工艺 |
|
|
虚拟工业机器人 |
教学资源 |
l 基于AR的工业机器人工作站组成与结构建设 l 基于AR的工业机器人结构认知与设计 l 基于AR的工业机器人指令示教编程 l 基于AR的工业机器人手动控制应用 l 基于AR的工业机器人IO通信编程应用 l 基于AR的工业机器人多种坐标系建设与应用 l 基于AR的分拣加工实操与编程 l 基于AR的码垛加工实操与编程 l 基于AR的喷涂加工实操与编程 l 基于AR的工业机器人的平面轨迹规划 l 基于AR的工业机器人焊接实训 l 基于AR的机器人故障维护与排除 |